Hãy nhập câu hỏi của bạn vào đây, nếu là tài khoản VIP, bạn sẽ được ưu tiên trả lời.
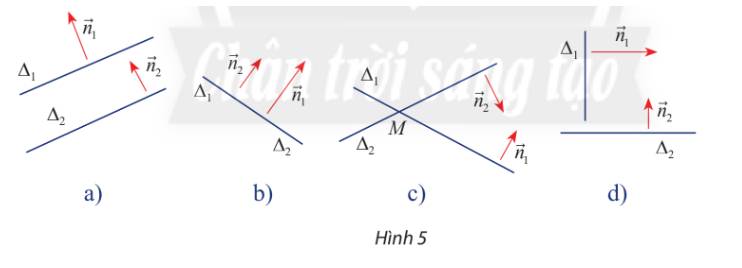

Dựa vào hình vẽ ta có
a) \(\overrightarrow {{n_1}} \) và \(\overrightarrow {{n_2}} \) cùng phương thì hai đường thẳng \({\Delta _1}\)và \({\Delta _2}\) song song
b) \(\overrightarrow {{n_1}} \) và \(\overrightarrow {{n_2}} \) không cùng phương thì hai đường thẳng \({\Delta _1}\)và \({\Delta _2}\) cắt nhau
c) \(\overrightarrow {{n_1}} \) và \(\overrightarrow {{n_2}} \) vuông góc thì hai đường thẳng \({\Delta _1}\)và \({\Delta _2}\) vuông góc
Ta có: \(\cos \left( {{\Delta _1},{\Delta _2}} \right) = \left| {\cos \left( {\overrightarrow {{u_1}} ;\overrightarrow {{u_2}} } \right)} \right| = \frac{{\left| {{a_1}{a_2} + {b_1}{b_2}} \right|}}{{\sqrt {a_1^2 + b_1^2} .\sqrt {a_2^2 + b_2^2} }}.\)
a) Góc \(\varphi \) và góc \(\left( {\overrightarrow {{n_1}} ,\overrightarrow {{n_2}} } \right)\) có thể bằng nhau hoặc bù nhau.
b) Do góc \(\varphi \) và góc \(\left( {\overrightarrow {{n_1}} ,\overrightarrow {{n_2}} } \right)\) có thể bằng nhau hoặc bù nhau nên \(\cos \varphi = \left| {\cos \left( {\overrightarrow {{n_1}} ,\overrightarrow {{n_2}} } \right)} \right|\)
Vectơ pháp tuyến của đường thẳng \(\Delta :2x - 3y + 4 = 0\)là: \(\overrightarrow n = \left( {2; - 3} \right)\).
Chọn D
a) \(\overrightarrow a \bot \overrightarrow b \Leftrightarrow \overrightarrow a .\overrightarrow b = \overrightarrow 0 \Leftrightarrow {a_1}{b_1} + {a_2}{b_2} = 0\)
b) \(\overrightarrow a \) và \(\overrightarrow b \) cùng phương \( \Leftrightarrow \left\{ \begin{array}{l}{a_1} = t{b_1}\\{a_2} = t{b_2}\end{array} \right.\) hay \(\left\{ \begin{array}{l}{b_1} = k{a_1}\\{b_2} = k{a_2}\end{array} \right.\)
\( \Leftrightarrow {a_1}{b_2} - {a_2}{b_1} = {a_1}.k{a_2} - {a_2}.k{a_1} = 0\)
c) \(\left| {\overrightarrow a } \right| = \sqrt {{{\left( {\overrightarrow a } \right)}^2}} = \sqrt {{a_1}^2 + {a_2}^2} \)
d) \(\overrightarrow {AB} = ({x_B} - {x_A};{y_B} - {y_A}) \Rightarrow AB = \sqrt {{{\left( {\overrightarrow {AB} } \right)}^2}} \)
\( = \sqrt {{{\left( {{x_B} - {x_A}} \right)}^2} + {{\left( {{y_B} - {y_A}} \right)}^2}} \)
e) \(\cos (\overrightarrow a ,\overrightarrow b ) = \frac{{\overrightarrow a .\overrightarrow b }}{{\left| {\overrightarrow a } \right|.\left| {\overrightarrow b } \right|}} = \frac{{{a_1}{b_1} + {a_2}{b_2}}}{{\sqrt {{a_1}^2 + {a_2}^2} .\sqrt {{b_1}^2 + {b_2}^2} }}\)
a: \(\Leftrightarrow\left\{{}\begin{matrix}x+3y=5\\2x-y=6\end{matrix}\right.\)=>x=23/7; y=4/7
b: \(2\cdot\overrightarrow{A}+3\cdot\overrightarrow{B}\)
\(=\left(2\cdot1+3\cdot3;2\cdot2+3\cdot\left(-1\right)\right)\)
=(11;1)
c: \(\overrightarrow{A}\cdot\overrightarrow{B}=\left(3;-2\right)\)
a) Các giao điểm của (E) với trục hoành có tọa độ thỏa mãn hệ phương trình
\(\left\{ \begin{array}{l}\frac{{{x^2}}}{{{a^2}}} + \frac{{{y^2}}}{{{b^2}}} = 1\\y = 0\end{array} \right. \Leftrightarrow \left\{ \begin{array}{l}x \pm a\\y = 0\end{array} \right. \Rightarrow \left\{ \begin{array}{l}{A_1}\left( { - a;0} \right)\\{A_2}\left( {a;0} \right)\end{array} \right.\)
Các giao điểm của (E) với trục tung có tọa độ thỏa mãn hệ phương trình
\(\left\{ \begin{array}{l}\frac{{{x^2}}}{{{a^2}}} + \frac{{{y^2}}}{{{b^2}}} = 1\\x = 0\end{array} \right. \Leftrightarrow \left\{ \begin{array}{l}x = 0\\y = \pm b\end{array} \right. \Rightarrow \left\{ \begin{array}{l}{B_1}\left( {0; - b} \right)\\{B_2}\left( {0;b} \right)\end{array} \right.\)
Ta có \({A_1}{A_2} = 2a,{B_1}{B_2} = 2b\).
b) Do M thuộc (E) nên ta có \(\frac{{x_o^2}}{{{a^2}}} + \frac{{y_o^2}}{{{b^2}}} = 1\)
Do \(a > b > 0\) nên ta có \(\frac{{x_o^2}}{{{a^2}}} \le \frac{{x_o^2}}{{{b^2}}}\). Suy ra \(1 \le \frac{{x_o^2}}{{{b^2}}} + \frac{{y_o^2}}{{{b^2}}} \Rightarrow {b^2} \le x_o^2 + y_o^2\)
Tương tự ta có \(\frac{{y_o^2}}{{{a^2}}} \le \frac{{y_o^2}}{{{b^2}}}\) nên \(1 \ge \frac{{y_o^2}}{{{a^2}}} \le \frac{{y_o^2}}{{{b^2}}} \Rightarrow {a^2} \ge x_o^2 + y_o^2\)
Vậy \({b^2} \le x_o^2 + y_o^2 \le {a^2}\)
Ta có \(OM = \sqrt {x_o^2 + y_o^2} \) suy ra \(b \le OM \le a\)
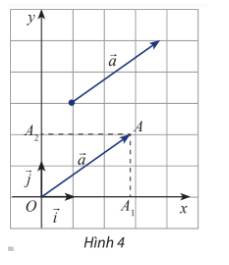
Áp dụng quy tắc hình bình hành ta có \(\overrightarrow {OA} = \overrightarrow {O{A_1}} + \overrightarrow {O{A_2}} \)
Dựa vào hình vẽ ta thấy \({\overrightarrow {OA} _1} = 3\overrightarrow i \) và \({\overrightarrow {OA} _2} = 2\overrightarrow j \)
Vậy \(\overrightarrow a = \overrightarrow {OA} = \overrightarrow {O{A_1}} + \overrightarrow {O{A_2}} = 3\overrightarrow i + 2\overrightarrow j \)
+) Từ phương trình \({\Delta _1}:{a_1}x + {b_1}y + {c_1} = 0\) ta xác định được tọa độ của vectơ \(\overrightarrow {{n_1}} \) là \(\left( {{a_1};{b_1}} \right)\)
+) Từ phương trình \({\Delta _2}:{a_2}x + {b_2}y + {c_2} = 0\) ta xác định được tọa độ của vectơ \(\overrightarrow {{n_2}} \) là \(\left( {{a_2};{b_2}} \right)\)
+) \(\cos \left( {\overrightarrow {{n_1}} ,\overrightarrow {{n_2}} } \right) = \frac{{\overrightarrow {{n_1}} .\overrightarrow {{n_2}} }}{{\left| {\overrightarrow {{n_1}} } \right|.\left| {\overrightarrow {{n_2}} } \right|}} = \frac{{{a_1}{a_2} + {b_1}{b_2}}}{{\sqrt {{a_1}^2 + {b_1}^2} \sqrt {{a_2}^2 + {b_2}^2} }}\)