Cho hai điểm \(A\left( {{x_A};{y_A}} \right),B\left( {{x_B};{y_B}} \right)\). Từ biểu thức \(\overrightarrow {AB} = \overrightarrow {OB} - \overrightarrow {OA} \), tìm tọa độ vectơ \(\overrightarrow {AB} \) theo tọa độ hai điểm A,B
K
Khách
Hãy nhập câu hỏi của bạn vào đây, nếu là tài khoản VIP, bạn sẽ được ưu tiên trả lời.

Những câu hỏi liên quan
HQ
Hà Quang Minh
Giáo viên
26 tháng 9 2023
a) \(\overrightarrow a \bot \overrightarrow b \Leftrightarrow \overrightarrow a .\overrightarrow b = \overrightarrow 0 \Leftrightarrow {a_1}{b_1} + {a_2}{b_2} = 0\)
b) \(\overrightarrow a \) và \(\overrightarrow b \) cùng phương \( \Leftrightarrow \left\{ \begin{array}{l}{a_1} = t{b_1}\\{a_2} = t{b_2}\end{array} \right.\) hay \(\left\{ \begin{array}{l}{b_1} = k{a_1}\\{b_2} = k{a_2}\end{array} \right.\)
\( \Leftrightarrow {a_1}{b_2} - {a_2}{b_1} = {a_1}.k{a_2} - {a_2}.k{a_1} = 0\)
c) \(\left| {\overrightarrow a } \right| = \sqrt {{{\left( {\overrightarrow a } \right)}^2}} = \sqrt {{a_1}^2 + {a_2}^2} \)
d) \(\overrightarrow {AB} = ({x_B} - {x_A};{y_B} - {y_A}) \Rightarrow AB = \sqrt {{{\left( {\overrightarrow {AB} } \right)}^2}} \)
\( = \sqrt {{{\left( {{x_B} - {x_A}} \right)}^2} + {{\left( {{y_B} - {y_A}} \right)}^2}} \)
e) \(\cos (\overrightarrow a ,\overrightarrow b ) = \frac{{\overrightarrow a .\overrightarrow b }}{{\left| {\overrightarrow a } \right|.\left| {\overrightarrow b } \right|}} = \frac{{{a_1}{b_1} + {a_2}{b_2}}}{{\sqrt {{a_1}^2 + {a_2}^2} .\sqrt {{b_1}^2 + {b_2}^2} }}\)
HC
4 tháng 4 2017
a) ta có pt hoành độ giao điểm: \(2x^2=x+1\)
\(\Rightarrow\left[{}\begin{matrix}x=1\\x=\dfrac{-1}{2}\end{matrix}\right.\)
tại x= 1 thì ta có tọa độ giao điểm A(1;2)
tại x=\(\dfrac{-1}{2}\) thì ta có tọa độ giao điểm B(\(\dfrac{-1}{2};\dfrac{1}{2}\))
còn câu b) để từ từ mình suy nghĩ rồi giải sau
HC
6 tháng 4 2017
mình làm ra được câu b rồi
ta có pt hđgđ
\(2x^2=2mx-m-2x+2\)
\(\Leftrightarrow2x^2-\left(2m-2\right)x+\left(m-2\right)=0 \)
\(\Delta=m^2-4m+5>0\)
\(\Rightarrow X_A=\dfrac{m-1-\sqrt{m^2-4m+5}}{2};X_B=\dfrac{m-1+\sqrt{m^2-4m+5}}{2}\)
\(\Rightarrow Y_A=2\left(\dfrac{m-1-\sqrt{m^2-4m+5}}{2}\right)^2;Y_B=2\left(\dfrac{m-1+\sqrt{m^2-4m+5}}{2}\right)^2\)
27 tháng 2 2022
a: Phương trình hoành độ giao điểm là: \(x^2-mx+m-1=0\)
\(\Delta=\left(-m\right)^2-4\cdot\left(m-1\right)=m^2-4m+4=\left(m-2\right)^2\)
Để (P) cắt (d) tại hai điểm phân biệt thì m-2<>0
hay m<>2
b: \(\left|x_A-x_B\right|< 3\)
\(\Leftrightarrow\sqrt{\left(x_1+x_2\right)^2-4x_1x_2}< 3\)
\(\Leftrightarrow\left(x_1+x_2\right)^2-4x_1x_2< 9\)
\(\Leftrightarrow m^2-4\left(m-1\right)< 9\)
\(\Leftrightarrow\left(m-2\right)^2-3< 0\)
=>(m+1)(m-5)<0
=>-1<m<5
NV
Nguyễn Việt Lâm
Giáo viên
1 tháng 4 2020
Phương trình hoành độ giao điểm:
\(x^2=2x+3-m^2\Leftrightarrow x^2-2x+m^2-3=0\)
Để 2 đồ thị cắt nhau tại 2 điểm pb
\(\Leftrightarrow\Delta'>0\Leftrightarrow4-m^2>0\Rightarrow-2< m< 2\)
Theo hệ thức Viet: \(\left\{{}\begin{matrix}x_A+x_B=2\\x_Ax_B=m^2-3\end{matrix}\right.\)
\(\Rightarrow T=\left|m^2-3-4-2\right|=\left|m^2-9\right|\)
Do \(0\le m^2< 4\Rightarrow-9\le m^2-9< -5\)
\(\Rightarrow0< \left|m^2-9\right|\le9\Rightarrow0< T\le9\)
\(\Rightarrow T_{max}=9\) khi \(m=0\)
9 tháng 6 2021
\(A\left(x_a;y_a\right)\Rightarrow\overrightarrow{IA}=x_a\overrightarrow{i}+y_a\overrightarrow{j}\)
\(B\left(x_b;y_b\right)\Rightarrow\overrightarrow{IB}=x_b\overrightarrow{i}+y_b\overrightarrow{j}\)(Với \(\overrightarrow{i};\overrightarrow{j}\)là hai vector đơn vị của trục Ox,Oy)
\(\Rightarrow\overrightarrow{AB}=\overrightarrow{IB}-\overrightarrow{IA}=\left(x_b-x_a\right)\overrightarrow{i}+\left(y_b-y_a\right)\overrightarrow{j}\)
Vậy tọa độ của vector AB là \(\overrightarrow{AB}=\left(x_b-x_a;y_b-y_a\right).\)
HQ
Hà Quang Minh
Giáo viên
26 tháng 9 2023
a) M là trung điểm của đoạn thẳng AB, áp dụng tính chất trung điểm ta có:
\(\overrightarrow {OM} = \frac{1}{2}\left( {\overrightarrow {OA} + \overrightarrow {OB} } \right)\)
b) G là trọng tâm của tam giác ABC, áp dụng tính chất trọng tâm của tam giác ta có:
\(\overrightarrow {OG} = \frac{1}{3}\left( {\overrightarrow {OA} + \overrightarrow {OB} + \overrightarrow {OC} } \right)\)
c) Ta có \(\overrightarrow {OA} = \left( {{x_A};{y_A}} \right),\overrightarrow {OB} = \left( {{x_B};{y_B}} \right),\overrightarrow {OC} = \left( {{x_C};{y_C}} \right)\)
Suy ra:
\(\begin{array}{l}\overrightarrow {OM} = \frac{1}{2}\left( {\overrightarrow {OA} + \overrightarrow {OB} } \right) = \frac{1}{2}\left[ {\left( {{x_A};{y_A}} \right) + \left( {{x_B};{y_B}} \right)} \right]\\ = \left( {\frac{{{x_A} + {x_B}}}{2};\frac{{{y_A} + {y_B}}}{2}} \right)\end{array}\)
\(\begin{array}{l}
\overrightarrow {OG} = \frac{1}{3}\left( {\overrightarrow {OA} + \overrightarrow {OB} + \overrightarrow {OC} } \right) = \frac{1}{3}\left[ {\left( {{x_A};{y_A}} \right) + \left( {{x_B};{y_B}} \right) + \left( {{x_c};{y_c}} \right)} \right]\\
= \left( {\frac{{{x_A} + {x_B} + {x_C}}}{3};\frac{{{y_A} + {y_B} + {y_C}}}{3}} \right)
\end{array}\)
Mà ta có tọa độ vectơ \(\overrightarrow {OM} \) chính là tọa độ điểm M, nên ta có
Tọa độ điểm M là \(\left( {{x_M};{y_M}} \right) = \left( {\frac{{{x_A} + {x_B}}}{2};\frac{{{y_A} + {y_B}}}{2}} \right)\)
Tọa độ điểm G là \(\left( {\frac{{{x_A} + {x_B} + {x_C}}}{3};\frac{{{y_A} + {y_B} + {y_C}}}{3}} \right)\)
HQ
Hà Quang Minh
Giáo viên
28 tháng 9 2023
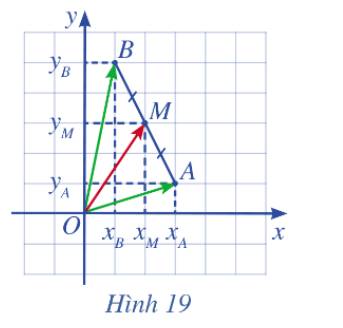
a) Ta có vectơ \(\overrightarrow {OM} \) biểu diễn theo hai vectơ \(\overrightarrow {OA} \) và \(\overrightarrow {OB} \) là: \(\overrightarrow {OM} = \frac{1}{2}\left( {\overrightarrow {OA} + \overrightarrow {OB} } \right)\)
b) Do tọa độ hai điểm A và B là: \(A\left( {{x_A},{y_A}} \right),B\left( {{x_B},{y_B}} \right)\) nên ta có:\(\overrightarrow {OA} = \left( {{x_A},{y_A}} \right),\overrightarrow {OB} = \left( {{x_B},{y_B}} \right)\)
Vậy \(\overrightarrow {OM} = \frac{1}{2}\left( {\overrightarrow {OA} + \overrightarrow {OB} } \right) = \frac{1}{2}\left( {{x_A} + {x_B};{y_A} + {y_B}} \right) = \left( {\frac{{{x_A} + {x_B}}}{2};\frac{{{y_A} + {y_B}}}{2}} \right)\)
Tọa độ điểm M chính là tọa độ của vectơ nên tọa độ M là \(M\left( {\frac{{{x_A} + {x_B}}}{2};\frac{{{y_A} + {y_B}}}{2}} \right)\)
Ta có tọa độ vectơ \(\overrightarrow {OB} ,\overrightarrow {OA} \) chính là tọa độ điểm B và A
Nên ta có \(\overrightarrow {OB} = \left( {{x_B};{y_B}} \right),\overrightarrow {OA} = \left( {{x_A};{y_A}} \right)\)
\(\overrightarrow {AB} = \overrightarrow {OB} - \overrightarrow {OA} = \left( {{x_B};{y_B}} \right) - \left( {{x_A};{y_A}} \right) = ({x_B} - {x_A};{y_B} - {y_A})\)